Introduction:
Our project which is to build robots that will compete in different competitions. Another objective of this project is to build three areas for each one of the competition that will take place. The first set of competition will consist of sumo bot is defined as a match between two robots pushing each other out of a boundary area. Second competition is a Nat Car race which will be defined as a robot following a track around a ring. Third competition consist of designing arenas for all competitions which the best arenas designed by a team will have their robots performed on. Any attempts to flip, harm or jam components to another robot while competing is not allowed.The relevance of this project for team 3 is to gain skills, experience, and knowledge in engineering design. Our sponsor is the mechanical engineering department with the purpose of gaining knowledge in robotics. It is important for the Engineering Department to see the team apply our knowledge, gained through studying at Northern Arizona University, in this project. An issue within our mechanical team is that none of our team has machining skills that will be needed throughout this process. This issue will be dealt with by 3D printing components and outsourcing machining parts needed to build anyone of the robots in this project.
What is a Sumobot? (http://robogames.net/)
Two robots compete in a head-to-head match following the basic system of traditional human sumo matches. Robots are allowed no weapons, and are not allowed to flip each other. The sole purpose is a pushing match between the two robots to force the other from the arena. Multiple weight classes and control systems are allowed (autonomous compete against autonomous and R/C against R/C – they are separate classes and do not compete against each other [16].”
Competition Rules:
Event length: 3 minutes
- Two robots will compete in each event
- No weapons are allowed
- Robot must fit in a tube to get dimensions checked.
- Robot must force each other to get out of arena.
Robot Classes:
- Autonomous (Mega/Nano)
- Remote controlled (Mega)
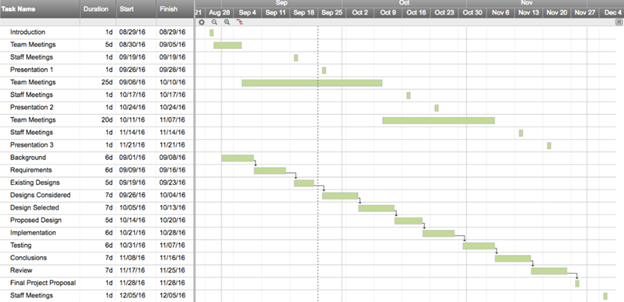
Team Gantt Chart:
Till December ( Will get updated )
Implementation:
Coming Soon !!
Testing:
Coming Soon !!